













テストターゲット
テストターゲット概要
本ページはイメージングリソースガイドのセクション12.2です
テストターゲット製品は、イメージングシステムの性能 (画質)を評価したり、キャリブレーションを行う目的でデザインされています。ビジョンシステムのベンチマークや認証、測定評価といったトラブルシューティングや、複数のシステムが互いに良好に作動しているかを見極めるのにも使用できます。画質は、解像力やコントラスト、変調伝達関数 (MTF)、被写界深度 (DOF)、ディストーションといった複数の要素から評価されるため、システムによって異なるテストターゲットが必要だったり、或いは複数のテストターゲットが必要になります。テストターゲットによる評価結果は、目視観察のみで評価された場合は、測定者による主観評価になります。例えば、正常視力を持つ人は、視力0.8や0.6程度の人よりも一般的に分解能が高く、より微細な部分を見つけることができます。また、こういったテストターゲット製品を日常見ている人は、システムが実際に解像できていないディテールでも、そのチャートパターンを普段見慣れてしまっているために、心理的に読み誤ってしまう場合があります。目視検査は、2つの異なるシステムを比較する場合には効果的ですが、そうでない場合は常に正当性を立証できるわけではありません。可能であるなら、ソフトウェアを用いて計測の真の正当性を立証していくことが重要です。
| 解像力測定用テストターゲット | |||
| ターゲット | アプリケーション | 長所 | 短所 |
| USAF 1951 | ビジョンシステムや光学試験機、顕微鏡、高倍率ビデオレンズ、蛍光顕微鏡や共焦点顕微鏡、フォトリソグラフィ、ナノテクノロジーの解像力テスト用 | 個別の空間周波数において、水平と垂直方向の解像力を同時に評価 | システム性能を完全に評価するために、ターゲットの位置を何度も動かす必要あり |
| 視野全体におけるベストフォーカス面を見つけるのが不得意 | |||
| ロンキー・ルーリング | 解像力とコントラストのテスト | 視野全体におけるシステムのベストフォーカス面も同時に確認 | 評価する空間周波数別に複数のターゲットが必要になる |
| 回折テスト用 | 解像力が非対称に低下する際の評価ができない | ||
| スター | 高解像や高倍率イメージングシステムの比較 | 解像力とコントラストを試験する際に潜在的に最もパワフル | システムの実際の解像力の定量化が困難 |
| システムアライメント用 | 異なる視野方向での解像力の連続的変化を、ターゲットの位置を変えることなく評価可能 | ||
| 組立時のアシスト用 | 異なる画像システム間の比較が容易 | 先進的な画像解析ソフトウェアが必要 | |
Table 1: 解像力測定用テストターゲットのアプリケーションと長所/短所
USAF 1951 ターゲット
本ページはイメージングリソースガイドのセクション12.3です
USAF 1951 ターゲットは、テストターゲット製品の中で最も広く使われているものの一つです。水平方向と垂直方向の一対の3バーチャートで構成され、各バーチャートのナンバリング付きで、様々なサイズの3バーチャートが基板内に施されています (Figure 1参照)。

Figure 1: USAF 1951 ターゲットの例
水平と垂直方向の各チャートは、ビジョンシステムの物平面上の特定空間周波数 (単位は$ \small{ \tfrac{\text{本}}{\text{mm}} } $)における両方向の解像力を同時に評価するために用いられます。各ラインは固有の線幅と空間を持ち、1~6までの通し番号 (ライン数)が振られています。同時に、6つのライン数で1グループを形成し、各グループ毎にも別の通し番号 (正値、負値、または0)が振られています。グループ数の範囲は、通常-2から+7までです。このグループ数とライン数の組み合わせにより、バーチャートの空間周波数が決定されます。解像力は、バーチャートの線幅と空間の大きさによって決まり、バーの長さはバーの幅の5倍の大きさでデザインされています (Figure 2参照)。

Figure 2: USAF 1951 ターゲットのパターン規格
1ラインペアは、一本の黒線と一本の白線の組み合わせと同じ大きさになります。垂直方向のバーチャートは、水平方向の解像力を算出するために、また水平方向のバーチャートは、垂直方向の解像力を算出するために用いられます。
イメージングシステムの限界解像力は、定性的には、バーチャートの黒線と白線が像ボケし始める一つ手前のグループ数/ライン数の組み合わせで定義されます。定量的には、限界解像力 (単位は$ \small{ \tfrac{\text{本}}{\text{mm}} } $)の大きさは次の公式 1により求められます。
USAF 1951ターゲットは、グループ数/ライン数が高くなるほど螺旋状に沿って基板の中央に向かっていくため、解像度の高いパターンほど基板の中央に配置されます。このパターンレイアウトは、ズームレンズをテストする際にメリットがあります。ズームレンズの倍率を上げて実視野サイズを小さくしていった時に、ターゲットの位置を変えなくても解像度の高いパターンを映し出すことができるからです。
USAF 1951ターゲットの限界
USAF 1951ターゲットは、高解像力なパターンが基板の中央部に配置されることから、幾つかの不利な点もあります。例えば、レンズは、実視野の中心部とコーナー部では異なるレベルの解像力を作り出します。大抵の場合、視野の中心から離れていくほど解像力は落ちていくため、解像力とコントラストを様々な位置で評価していくことが重要になります。システム性能を完全に評価するために、実視野内でターゲットの位置を変えて画像を何枚も撮っていく必要があり、試験に費やす時間も必然的に増えることになります。また、システムが実視野の中心部にだけピントを合わせているのか、実視野全体なのかによっても問題を引き起こします。なぜなら、システムの解像力は場所によって変わるため、どの位置で実視野全体がベストフォーカスになるのかをUSAF 1951ターゲットを用いて決めるのは難しくなるからです。このターゲットを用いて画像中央部にピントを合わせた時、レンズの中には中心部において解像力が非常に高くなったとしても、コーナー部ではとても低いものになってしまいます。こうした場合、レンズのピントを若干デフォーカスすることで視野全体の解像力のバランスを取ることができますが、中心部での解像力性能を犠牲にしなくてはなりません。しかしながら、この中心部の解像力性能の損失は必ずしも悪いことではありません。なぜなら、視野全体の解像力のバランスを取ってアプリケーション要件に適合させた後でも、レンズはこの状態から更に良くすることもできるからです (Figure 3参照)。

Figure 3a: USAF 1951の例: 画像の中心部とコーナー部の位置を再調整し、ベストフォーカスをターゲットの中央部にのみ来るよう設定

Figure 3b: 視野全体にわたりバランスよくピント調整した時の画像中心部とコーナー部
実視野全体にわたって解像力を調整するやり方は、実視野中心部だけにピントを合わせてシステム性能の結論を下す前に、全フィールドポジションで評価するという意見を後押しします。テストターゲットを使って実視野中心部で最善の性能が得られるようピント合わせしたレンズは、実視野全体で見るとベストに機能していない場合があります。しかしながら、一か所のピント設定で評価を完了させることはとても重要です。視野中央の評価を行った後に、今度は同コーナー部でベストな性能が得られるようピントを再調整することが、システムのベスト性能を決定するのに必要と思えるかもしれませんが、決してそうではありません。システムが一旦導入されると、システム作動中にピントを再調整することが通常不可能なためです。
なおこのターゲットの派生製品で、実視野全体における評価を可能にするものもあります。USAFパターンをターゲット基板中の様々な場所に施しています (Figure 4参照)。

Figure 4a: USAF 1951ホイールターゲット

Figure 4b: USAF 1951フィールドテストチャート
ロンキー・ルーリング
本ページはイメージングリソースガイドのセクション12.4です
USAF 1951ターゲットの使用によって生じる問題の中には、ロンキー・ルーリングという別のターゲット製品を用いることで解決出来る場合があります。このターゲットは、一種類の大きさの空間周波数の白黒パターンで構成され、その白黒線を一方向のみに基板全体に施しています (Figure 5参照)。基板全体にわたりこの白黒パターンが施されていることから、視野全体でのシステムのベストフォーカス面を同時に見極めることができます。一つの空間周波数の評価だけが必要なアプリケーションには、ロンキー・ルーリングは使い勝手が良く、直接的なツールとなります。ロンキー・ルーリングを用いる際には2つの不利な点があります。一つは、空間周波数が一種類の大きさしか持たないことから、複数の周波数で評価する必要がある場合にはターゲットが複数枚必要になる点です。次に、非点収差などの影響によって視野全体での解像力性能の低下が非対称に起こる場合、ロンキーのパターンが一方向にのみしか施されていないことからそれを評価することができません。これを解決するには、2枚のターゲットを互いに90°交差した状態で重ね合わせ、2番目の画像を解像力の評価用に使用します。なお、レンズのピントがベストフォーカスになるようバランスを取っていても、レンズに非点収差があった場合は、重ねたターゲットを前後ひっくり返した時にこのバランスを見つけるのが難しくなります。

Figure 5: ロンキー・ルーリング
スターターゲット
本ページはイメージングリソースガイドのセクション12.5です
複数のパターンで構成されたスターターゲットは、USAFとロンキーターゲットの各々の長所の多くを備えていることから、システムの解像力とコントラストを評価するのに恐らく最もパワフルなテストターゲットです。スターターゲットの各パターンは、既知の角度で作られたウェッジ状の黒線と白線を交互に配置し、全体としては一つの円を形成しています (Figure 6参照)。ウェッジパターンは、解像力の連続的変化になるため、基板中の様々な場所にそのパターンがあることで、ターゲットの位置を変えることなく、各場所での垂直方向と水平方向の解像力を評価することができます。
フィールド全体にわたり多くのスターパターンを持つことは、実視野全体にわたるベストフォーカス位置を決定するのにも役立ち、また様々な解像力の水平と垂直方向の情報を同時に分析できることから、異なるイメージングシステムの比較を容易にします。実際の製品のスターターゲットの配列パターンをFigure 4に紹介します。2つの異なるレンズ (A, B)で映したターゲットの中央部、中央下端部、コーナー部 (色枠で示した箇所)の画像の比較を併せて紹介します。本比較例では、500万画素で3.45µmの画素サイズを有するSony ICX625白黒センサーと白色バックライト照明器を用いて撮像しています。

Figure 6: スターターゲット

Figure 7: 同一焦点距離、同一Fナンバーを持つ2つの異なるレンズ (A, B)を同一センサーにセットして映したスターターゲットの画像: 中央下端部とコーナー部におけるレンズAの画質の良さは一目瞭然
スターターゲットの限界
他のターゲット製品と同様、スターターゲットにも不利となる点があります。ウェッジ状のパターンは、解像力が連続的に変化するため、被検システムが実際に達成している真の解像力の定量化が難しくなります。計算からこれを求めることは出来ますが、視覚情報から直感的にそれを行うのは容易ではありません。加えて、各円形パターンと非対称な像ボケの組み合わせが、ラインプロファイラなどのシンプルなソフトウェアツールを用いて真の解像力情報を引き出すことを難しくします。スターターゲットをフルに活用するには、より先進的な画像解析ソフトウェアが必要となります。
テレセントリシティターゲット
本ページはイメージングリソースガイドのセクション12.6です
テレセントリシティターゲットは、画像を評価して、正確に測定するための重要なツールです。その重要性は、ターゲットを撮像するレンズのテレセントリシティに関連します。ターゲットをレンズの光軸に対して45°傾けて配置することで、ターゲットの下側は上側よりもレンズから更に離れます (Figure 8参照)。

Figure 8: A telecentricity target placed under a lens.
非テレセントリック系のレンズでこれを撮像すると、パターンの垂直線は画像の下側に行くほど次第に狭くなるように映ります (Figure 9参照)。これに対して、テレセントリックレンズでこのターゲットを撮像すると、テレセントリシティがほぼ0°のため、真っ直ぐ下に降りた垂直線のまま画面に映し出されます (Figure 10参照)。

Figure 9: 非テレセントリックレンズ (焦点距離8mm)による画像 -画像の最下部 (遠点側)では、各線が一点の方向に集まっていく様子が確認できる。各線の水平方向における位置関係 (X1、X2)に着目すると、パターン最上部 (近点側)と最下部 (遠点側)で結像位置に違いがあることも確認できる。この結像位置の違いは、下記の計算式を用いることにより、テレセントリシティ (角度) として定量化することができる。

Figure 10: テレセントリックレンズによる画像 - 黒線の太さや黒線間の間隔が、上下対称に映るのが確認できる。ピントがあっていない部分でも同様となる。仮にパターンの方向が水平になるように配置したとしても、同様の結果が得られる。
- 測定ポイントY1, Y2間の距離 $ \Delta Y = \left( Y_1 - Y_2 \right) $
- Y1, Y2における選択した線の位置的誤差 $ \Delta X = \left| X_1 - X_2 \right| $
- テレセントリシティ (θ)の算出 $ \theta = \tan ^{-1} \left( \tfrac{\Delta X}{\Delta Y} \right) $
被写界深度 (DOF)用ターゲット
本ページはイメージングリソースガイドのセクション12.7です
DOFターゲットは、レンズの最良ピント位置から前後にどの程度離れてもディテールが維持できるかの可視化と定量化を可能にします。DOFターゲットの使用方法は至って簡単です。既知の空間周波数 (解像力)を持つラインパターンをレンズに対して所定の角度で傾けて設置し、画像のピントがどの距離まで維持されるかを評価します。ラインパターンがレンズから近付いたり離れたりすると、レンズのピントを再度合わせない限り像ボケが次第に大きくなり、最終的にはそのパターンを識別できなくなります。所望するレベルの解像力がなくなる地点は、コントラストを撮影距離別に測定することで求めることができます。これにより、被検レンズの特定設定条件時のDOF限界がわかります。DOFターゲットを使用した様子をFigure 11とFigure 12に紹介します。

Figure 11: DOFターゲットは、レンズに対して45°傾けて使用する必要あり
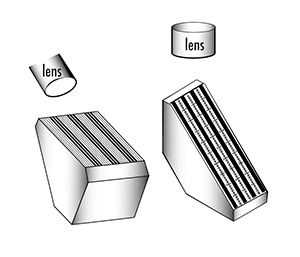
Figure 12: DOFターゲットを使ったセットアップ例
例: DOFターゲットの使用
50mm DG シリーズレンズ
Figure 13は、レンズ/カメラを真上からセットし、真下にあるDOFターゲットをレンズの光路に対して45°設置で配置した時の同 ターゲットの画像です。レンズはターゲットの中央部にピントを合わせており、ターゲットの上下最端部では画像がピンボケします。3つの画像は、レンズのFナンバーを変えた時のパターンの変化を表し、絞りを変えることで被写界深度がどれだけ変わるのかが見て取れます。
補足:固定空間周波数でデザインされたロンキー・ルーリングも、レンズに対して傾けて設置することで、この種のテストに用いることができます。設置角度を45°よりも大きくすれば、更に深いDOF範囲も測定可能になります。

Figure 13: 50mmレンズをF4, F8, F11の3条件で各々撮影した時のDOFターゲットの画像
被写界深度は、EOイメージングラボModule 1.8でも解説しています。
ディストーション用ターゲット
本ページはイメージングリソースガイドのセクション12.8です
ディストーション用ターゲットは、イメージ形成時の光学的エラーを正しく計測し、システムを校正するのに用いられます。この種のターゲットは、一般的にドットやグリッド (格子)、或いは正方形状のパターンを採用しており、大抵の画像処理ソフトウェアに搭載しているキャリブレーションツールと互換性があるため、実視野全体での計測のリマップや調整を可能にします。Figure 14にディストーションを計測するターゲットの一例を紹介します。

Figure 14: ドットグリッドタイプのディストーションターゲット
またFigure 15に調節可能なディストーションの種類を紹介します。

Figure 15: ディストーションの種類

















もしくは 現地オフィス一覧をご覧ください
クイック見積りツール
商品コードを入力して開始しましょう
Copyright 2023, エドモンド・オプティクス・ジャパン株式会社
[東京オフィス] 〒113-0021 東京都文京区本駒込2-29-24 パシフィックスクエア千石 4F
[秋田工場] 〒012-0801 秋田県湯沢市岩崎字壇ノ上3番地